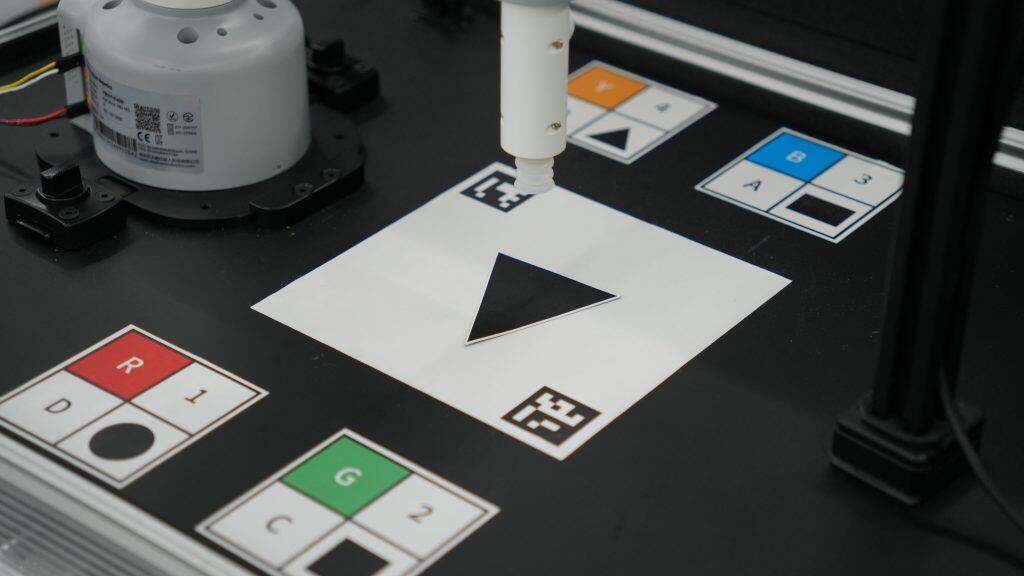
便攜式人工智能教育實訓(xùn)箱 產(chǎn)品特性 技術(shù)參數(shù) 使用手冊 立即購買 便攜式人工智能教育實訓(xùn)箱 便攜式人工智能教育實訓(xùn)箱是一款高度集成、即開即用的教學(xué)平臺,采用模塊化快插設(shè)計,兼具便攜性與擴展性。設(shè)備內(nèi)置Ubuntu系統(tǒng),支持ROS1/ROS2,集成了機器視覺、傳感控制、協(xié)作機器人等多項技術(shù),覆蓋多學(xué)科知識體系。 實訓(xùn)箱具備五大視覺算法與八大核心學(xué)習(xí)模塊,支持一鍵啟動、拖拽示教等多種交互方式,無需編程即可快速開展AI實踐。配備多種擴展模塊,適用于教學(xué)、實訓(xùn)、考核等場景,助力學(xué)生系統(tǒng)掌握AI與機器人技術(shù)全鏈路能力。 5 大視覺識別算法 四種顏色木塊、不同形狀卡片任意選擇,4種ID二維碼識別學(xué)習(xí)二維和三維世界之間的投影關(guān)系,圖像特征點帶你學(xué)習(xí)圖像分割、保存圖片特征,深度學(xué)習(xí)yolov5算法,讓你了解神經(jīng)網(wǎng)絡(luò),4種不同配件的快速啟動腳本,更快明白配件實際用法。 顏色識別 形狀識別 特征點識別 yolov5識別 AR二維碼識別 6 種適配機械臂 支持 myCobot、mechArm、myPalletizer 的M5Stack和樹莓派版本。 上一項 下一項 適配多種末端夾持器 上一項 下一項 視覺教育套裝 你能學(xué)到什么? ?opencvpython編程Ros學(xué)習(xí)逆運動學(xué) 手眼標定機器視覺機器人控制原理末端執(zhí)行器使用 OpenCV Python編程 Ros學(xué)習(xí) 逆運動學(xué) 手眼標定 機器視覺 機器人控制原理 末端執(zhí)行器使用 可視化軟件 支持可視化軟件操作,提供自定義簡單操作方法,快速開啟人工智能套裝。 提供標準化教育課程支持 秉持 “理論筑基 + 實戰(zhàn)賦能” 教育理念,深度覆蓋機器視覺認知、圖像分析與變換、物體識別等核心技術(shù)模塊,融入 YOLOv5 目標檢測等前沿算法,通過形狀、顏色、二維碼識別等項目實戰(zhàn),15 周期系統(tǒng)構(gòu)建從理論到應(yīng)用的機器視覺技術(shù)體系,助力技術(shù)人員能力進階。 開箱以及功能演示視頻









微信截圖_17611871525079-1024x607.png)